| 1.
Building blocks APRS in your car, it can be fairly easy :
A
tranceiver + tinytrak seems nice, the OpenTracker even better, and if
you use a dualbander, you have a voice channel left. Personally, I would
go the opensource (opentracker) way and I would build it all myself. This
would be solved with the very nice kenwood TM-D700. The disadvantage
here is the problem you have with all universal systems : some features
you like, some you absolutely do not want and some you lack. I
took the time to search and evaluate several solutions. I like the idea
of a car-PC to have a flexible system for music, GPS, APRS, ... I
was, on the other hand, been busy making a system to warn me if may
car came near some point of interest (POI) as there are : my home, my
parents home, and other interesting things :-) So, since I already had a GPS receiver and a processorboard (and, in fact, a positioning system), why not go the amateur way and link it with the TM-D700 (and drop the GSM modem) ? summarizing, my building blocks are :
2. TM-D700 As
said, the TM-D700 is a nice tranceiver. Kenwood makes fine equipment. Several people have done a good job experimenting with the TM-D700 and finding out how to communicate to read/change settings : This can come in handy further on ... (contents)
I
got a 2nd hand GPS receiver board (a µBlox
product). (contents)
On
a fair in Brussels, I saw zworld processor
boards. I did some nice projects since, all with those boards.
I tend to like the zworld products, but I recently got some severe problems with one of their core modules. It seems to be a construction fault, the Belgian supplier sent me a replacement board, but it had the same fault (I'm not able to program it, although other boards don't give me any problem - the supplier also tested them and has the same problems with those boards). Zworld seems not willing to solve this problem and they seem to let my supplier alone). Very,
very bad points for zworld. If it's not solved in the near future (this
problem delays one of my projects severely), I'll switch to other proccesorboards
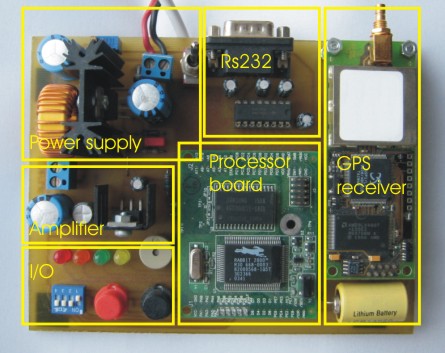
and will leave the zworld products. For now, this project has a working core module, so I will let it at that. Elements are (see foto) :
(contents)
Finally , I did put it all together. The
board stays the POI-warn board, but the software has been extended with
routines to control the tranceiver so it will send our position, if
the smartbeaconing routines instruct it to. The tranceiver & POI board are located in the rear of the car, the TM-D700 panel is in front. The IO of the processorboard is also brought to the front of the car (click photo).
(contents)
OK, I got nearly where I wanted to be : the TM-D700 transmits my position, using the smartbeaconing principle. The next things to do :
If you have some more questions/remarks/ideas/corrections/ ... , please tell me about it.
(contents) |